
Ile można „wycisnąć” z jednego zdjęcia? Proponujemy Państwu zabawę Single Photo Assessment, czyli wykonanie audytu maszyny na podstawie… jednej fotografii.
Czytaj dalej „SPA Challenge” itemprop="discussionURL"Dodaj komentarz
błąd błędowi nierówny
Deklaracja zgodności maszyny z dyrektywą 2006/42/WE jest, jak wiadomo,[1]vide Niezgodna deklaracja zgodności równie ważna jak sama maszyny. Ale czy wszystkie błędy w deklaracji należy traktować jako wykluczające możliwość dalszej eksploatacji maszyny?
Czytaj dalej „błąd błędowi nierówny” itemprop="discussionURL"Jeden komentarz
niezgodna deklaracja zgodności
Pytanie od klienta:
Czytaj dalej „niezgodna deklaracja zgodności” itemprop="discussionURL"Jeden komentarzWystawiona przez producenta deklaracja zgodności opiera się na nieaktualnych już dyrektywach. Czy konieczna jest aktualizacja deklaracji zgodności maszyny? Czy nieaktualne CE i tabliczka znamionowa powinny zostać poprawione obligatoryjnie?

Maszyna z Chin
Pytanie:
Czytaj dalej „Maszyna z Chin” itemprop="discussionURL"Dodaj komentarzWitam, będziemy ściągać kilka maszyn z Chin (producent jest sprawdzony – byliśmy na wizji lokalnej). Mam pytanie odnośnie certyfikacji CE. Potrzebujemy z dokumentów od Chińczyków certyfikat jednostki notyfikowanej oraz Declaration of Conformity. W dokumentach trzeba nawiązać do dyrektywy i normy. Czy wystarczy nawiązać do dyrektywy maszynowej i nie wskazywać żadnych norm? Czy wystarczy nawiązanie do dyrektywy maszynowej czy może jeszcze do jakiejś? I drugie pytanie, na waszej stronie wyczytałam o ocenie ryzyka, czy musi być w języku polskim czy wystarczy angielskim (jesteśmy odbiorcą końcowym i importerem)
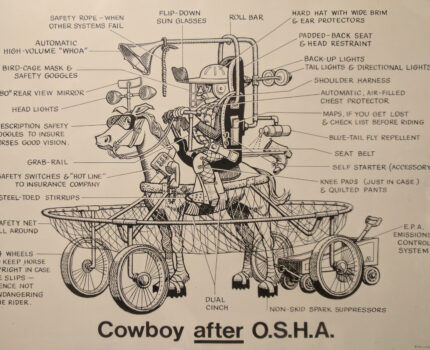
oburęczne sterowanie prasy — czyli kiedy środki ochronne są szkodliwe
„Czy podczas pracy automatycznej na prasie, reset kurtyn może być wykonywany poprzez pojedynczy przycisk?” Pytanie dość zaskakujące, bo niby jak inaczej miałby ten reset być wykonywany? Klient jednak pyta, ponieważ dotychczas na remontowanej przez niego prasie reset był realizowany przez urządzenie sterowania oburęcznego.
Czytaj dalej „oburęczne sterowanie prasy — czyli kiedy środki ochronne są szkodliwe” itemprop="discussionURL"Jeden komentarz
Evergreen Recertification (case study)
Customer’s question: “Do you perform CE certification of a machine after modernization? It’s about retrofitting the machine with a safety cage. The machine itself has CE certification.”
The answer is (obviously) both yes and no.
kejsstady, czyli recertyfikacja wiecznie żywa
Pytanie od klienta: „Czy przeprowadzają Państwo certyfikację CE maszyny po modernizacji? Chodzi o doposażenie maszyny w klatkę bezpieczeństwa. Sama maszyna ma certyfikację CE.”
Odpowiedź jest oczywista: i tak, i nie.
Czytaj dalej „kejsstady, czyli recertyfikacja wiecznie żywa” itemprop="discussionURL"Jeden komentarz
Essentially Minimum Requirements
At almost every meeting (conference, training session, etc.) dedicated to machine safety, where PIP (Polish H&S surveillance body) is involved, an obligatory item on the agenda is a chart illustrating the relationship between minimum and essential requirements. It’s like there was an initial chaos, then essential safety requirements were introduced for newly produced machines, and for old machines, manufactured or imported earlier (before 1993 in the „old” EU, before 2004 in Poland, before 2013 in Croatia), there are these so-called minimum requirements, a sort of „better then nothing” approach.
If the minimum requirements actually apply only to old machines, meaning that the problem will soon disappear on its own as the number of old machines decreases, then why keep talking about it all the time?
Czytaj dalej „Essentially Minimum Requirements” itemprop="discussionURL"Jeden komentarzwymagania zasadniczo minimalne
Na prawie każdym spotkaniu (konferencji, szkoleniu etc.) poświęconym bezpieczeństwu maszynowemu, w którym bierze udział PIP, obowiązkowy punkt programu to wykres obrazujący relację wymagań minimalnych i zasadniczych. Że niby na początku był chaos pierwotny, potem dla nowo produkowanych maszyn wprowadzono zasadnicze wymagania bezpieczeństwa, a dla maszyn starych, wyprodukowanych lub sprowadzonych wcześniej (w „starej” UE przed 1993, w Polsce przed 2004 r., w Chorwacji przed 2013), jest taka okryj-bida, wymagania minimalne.
Jeśli faktycznie wymagania minimalne dotyczą tylko tych tzw. starych maszyn, czyli problem wkrótce sam zniknie, bo starych maszyn ubywa – to po co o tym stale gadać?
Czytaj dalej „wymagania zasadniczo minimalne” itemprop="discussionURL"4 komentarze
Keep distance! — positioning of AOPD according to ISO 13855
An Active Opto-electronic Protective Device (AOPD), commonly referred to as an optical curtain or scanner, can be used to protect humans from hazardous machine components in accordance with the ISO 13855 standard, harmonized with the Machinery Directive, which ensures compliance with the essential safety requirements for machinery. The article discusses methods of determining the required distance between the AOPD and the hazardous elements, taking into account the device’s properties such as size, resolution, and the direction of approach by humans (orthogonal or parallel to the detection zone).
Czytaj dalej „Keep distance! — positioning of AOPD according to ISO 13855” itemprop="discussionURL"Jeden komentarz