Bezpieczeństwo maszyn przy produkcji samochodów to nie lada wyzwanie. Dzięki automatyzacji i robotyzacji nowy samochód wyjeżdża z fabryki co kilkadziesiąt sekund. Jak więc zapanować nad bezpieczeństwem obsługi maszyn na różnych etapach produkcji, jeżeli proces budowy dzieje się w tak szybkim tempie?
Obecnie to roboty przemysłowe zastępują ludzi w wielu niebezpiecznych zadaniach. Począwszy od spawania karoserii, lakierowania, nakładania klejów i uszczelnień po sam montaż, co w zamyśle ma poprawić wydajność, ale także bezpieczeństwo. Jednak, aby tak się stało, dana aplikacja musi spełniać wymagania bezpieczeństwa określone między innymi w normach zharmonizowanych z dyrektywą 2006/42/WE.
Pierwszą fundamentalną zasadą jest identyfikacja zagrożeń oraz ocena ryzyka. Roboty to szybkie i niebezpieczne maszyny, których trajektoria ruchu może nie być łatwo przewidywalna. Ponadto przestrzenie robocze maszyn w tej samej celi mogą na siebie nachodzić. Źródłem zagrożenia może być strefa pomiędzy ramieniem robota, a elementami nieruchomymi np. ogrodzeniem. Skutkiem nieszczęśliwego wypadku może być nawet śmierć w wyniku zmiażdżenia pracownika. Jak zminimalizować ryzyko? Oto 3 zasady, które znacznie podniosą bezpieczeństwo Twojej aplikacji:
- Przestrzeń ograniczona i chroniona robota.
Robot posiada swoją przestrzeń ograniczoną, którą stanowi zakres ruchu ramienia robota wraz z narzędziem i detalem. Ta z kolei powinna znajdować się wewnątrz przestrzeni chronionej, a więc naszego ogrodzenia. Ogrodzenie może stanowić granice dla ruchu robota, ale wtedy musi być wytrzymałe i odporne na jego uderzenia. Przestrzeń ograniczoną możemy zapewnić mechanicznie poprzez ograniczniki na osiach lub programowo, ale wówczas oprogramowanie musi mieć gwarantowany poziom niezawodności.
- Interwencje wewnątrz strefy.
Zasadniczo obserwacja procesu powinna być zapewniona spoza strefy niebezpiecznej, a więc z zewnątrz aplikacji. Jeśli chcemy programować robota lub sprawdzać jego trajektorie w trybie uczenia z pełną prędkością, wewnątrz strefy musimy zapewnić minimum 500 mm pomiędzy robotem w ruchu a budynkami, osłonami, czy innymi maszynami (nie wliczając w to maszyn współpracujących z robotem).
- Praca z urządzeniem zezwalającym.
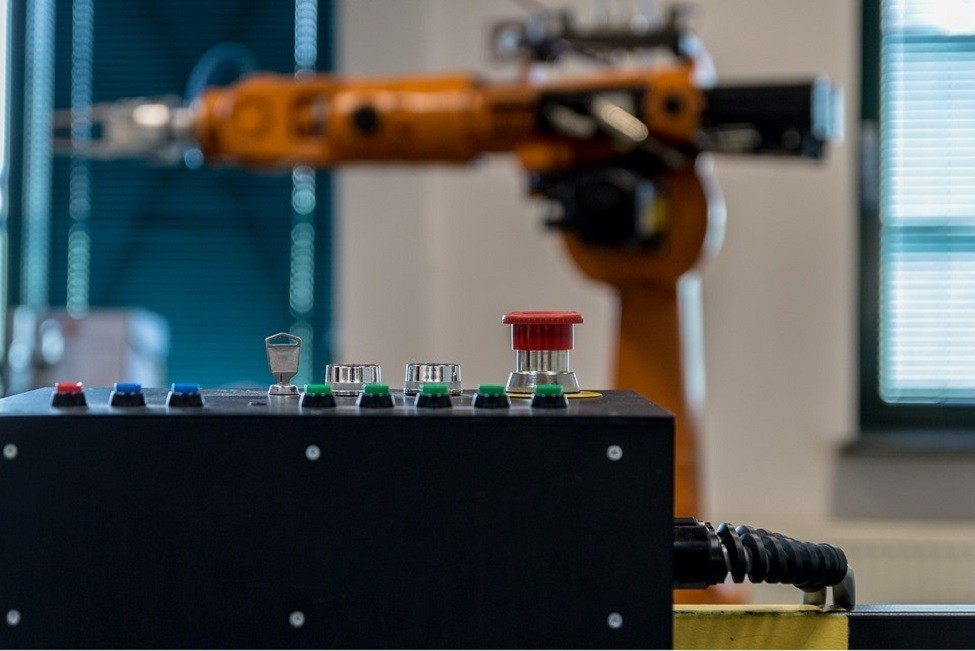
Pulpit podwieszany robota wyposażony w trójpozycyjne (0-1-2) urządzenie zezwalające pozwoli nam na ruch tylko i wyłącznie w pozycji środkowej. Pełne wciśnięcie (2) w wyniku np. stresu, lub pełne zwolnienie (0) powoduje, że urządzenie wyłącza się, a ruch jest niemożliwy.
Wszystkie wymagania bezpieczeństwa oraz wykaz zagrożeń znajdziesz w normach dotyczących robotów przemysłowych oraz zintegrowanych systemów wytwarzania. Natomiast te trzy zasady z pozoru oczywiste i mało skomplikowane stanowią bardzo częstą podstawę niezgodności podczas audytów bezpieczeństwa w przemyśle automotive. Pamiętaj, że ocenę ryzyka musisz przeprowadzić niezależnie od deklaracji zgodności WE, którą dostarczył Ci producent. Inżynierska ocena ryzyka wymaga między innymi analizy niezawodności obwodów sterowania dla funkcji bezpieczeństwa. Rzetelna ocena pozwoli sprawdzić, czy producent dotrzymał wszystkich warunków związanych z dyrektywą maszynową.